ヒューマノイド専用半導体は、アクチュエータ制御と統合SoCへ向かうのでしょうか。結論から言えば、向かう可能性はあります。ただし、それは「巨大AIチップを積めばロボットが動く」という話ではありません。ヒューマノイドに必要なのは、考える半導体だけでなく、考えたことを関節へ落とし込む制御の半導体です。
このテーマは、「脳」ではなく「脊髄」として見るとかなり整理しやすくなります。VLAや基盤モデルが「右手を伸ばす」と考えても、その命令を肩、肘、手首、指先の滑らかな動きへ翻訳する層がなければ、ロボットはただの賢い案山子です。できれば案山子よりは、もう少し働いてほしいですよね。
NVIDIAはJetson ThorをフィジカルAIやヒューマノイド向けのロボットコンピューターとして紹介し、GR00Tのような基盤モデルと組み合わせる流れを示しています。一方、Texas InstrumentsのSitara AM243xは産業向けリアルタイム制御、InfineonのAURIX TC4xは機能安全を重視するマイコンとして公式情報があります。この記事では、上位AIチップと、関節制御を担う制御SoCを混同しないように読み分けます。
ここでいう統合SoCは、モーター制御、センサー取り込み、信号処理、安全監視、通信を一つの近い制御層へ束ねる半導体を指します。巨大AIモデルを動かすチップではなく、動作命令を安全な関節運動へ変えるための半導体です。
ヒューマノイド専用半導体で見るべきは脳ではなく脊髄である
ヒューマノイドの半導体というと、どうしても頭部や上位AIに目が向きます。視覚、言語、行動計画を処理するチップは目立ちます。けれど、現実のロボットでは、そこから先が長いです。考えた動作を、転ばず、ぶつからず、熱を出しすぎず、各関節へ配る必要があります。
VLAは動作の意図を作る
VLAは、視覚と言語と行動をつなぐ考え方です。ロボットが物を見て、指示を理解し、次に何をするかを決める。この領域は、以前のオンデバイスVLAと省電力NPUの記事で扱いました。VLAは、ロボットにとって動作の意図を作る層です。
制御SoCは意図を関節命令へ翻訳する
制御SoCが担うのは、その意図を関節へ渡せる命令へ変換することです。肩をどの角度へ動かすか、肘をどれくらい滑らかに曲げるか、指先の力をどう抑えるか。ここでは大きな文章モデルより、リアルタイム性、センサー統合、安全停止、モータードライバとの連携が重要になります。
ドライバと関節モータは最後に物理世界を動かす
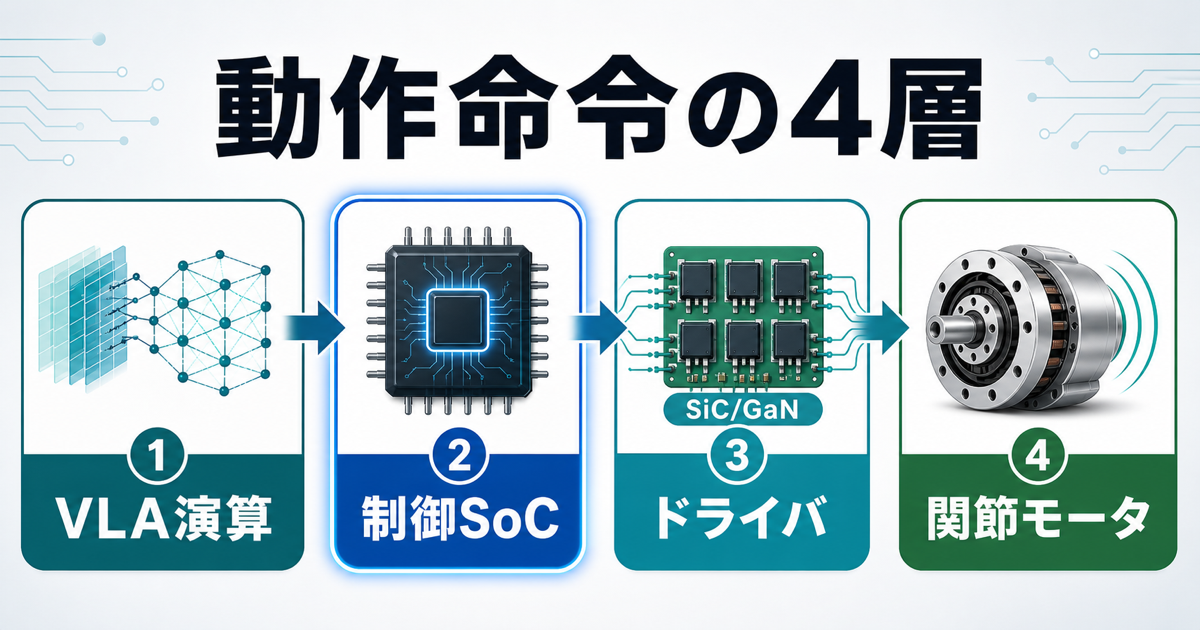
制御SoCの先には、モータードライバと関節モータがあります。前回扱ったSiC/GaN半導体は、このドライバ側の電力と熱に効く候補です。つまり、VLAが脳、制御SoCが脊髄、ドライバとモータが筋肉に近い役割を持ちます。この分担で見ると、ヒューマノイド半導体の地図がかなり整理されます。
- VLA演算は動作の意図を作る
- 制御SoCは意図を関節ごとの命令へ翻訳する
- ドライバは電力を関節モータへ渡す
- 関節モータは物理世界で動作を実行する
この階層を分けることが、既存記事とのカニバリ回避にもなります。HBMやLPDDRは記憶、SiC/GaNは筋肉側、Zonal Architectureは車の神経幹線。今回のテーマは、ロボットの動作命令を現場の関節へ落とす制御層です。
制御SoCはアクチュエータ制御で何を統合するのか
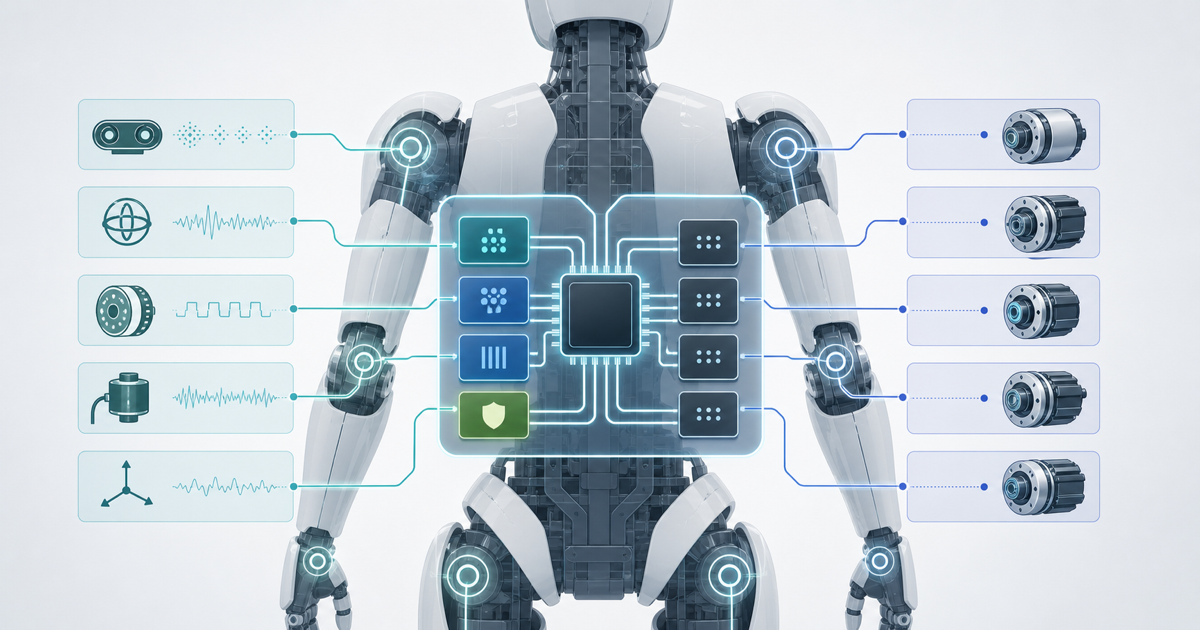
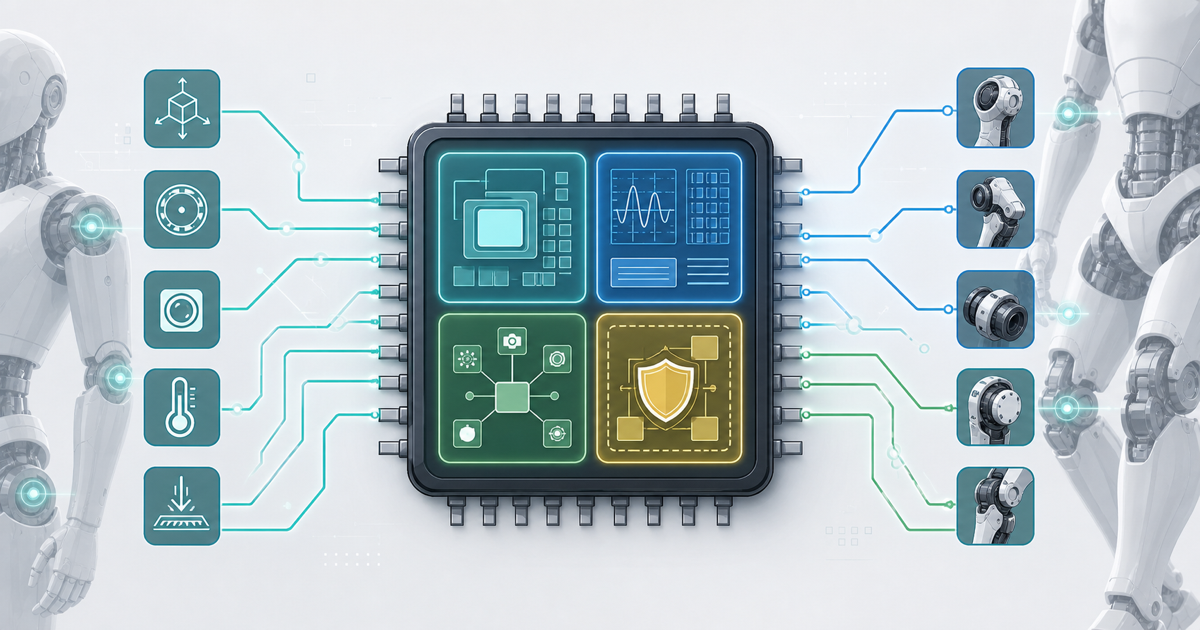
では、アクチュエータ制御SoCは何を統合するのでしょうか。ここでいう統合SoCは、上位AIモデルを丸ごと動かす巨大チップではありません。モーター制御、センサー取り込み、信号処理、安全監視、通信を近い場所でまとめる半導体として考えるとわかりやすいです。
MCUは決められた時間で制御を回す
MCUは、関節制御の土台です。一定の周期でセンサーを読み、モーターへ命令を出し、異常があれば安全側へ落とします。Texas InstrumentsはSitara AM243xについて、産業機器やロボティクスにおける低遅延リアルタイム制御の文脈で説明しています。ヒューマノイドでも、滑らかに動くにはこうした制御の確実さが必要です。
DSPやアクセラレータはセンサー信号を整える
関節には、エンコーダ、IMU、力覚センサー、温度センサーなどが関わります。これらの信号は、そのままでは扱いにくいことがあります。DSPや小さなアクセラレータでノイズを抑え、状態を推定し、関節がいまどう動いているかを把握する。ここは、AIというより制御工学の香りが強い領域です。
安全アイランドは危ない動きを止める
人の近くで動くヒューマノイドでは、安全停止が重要です。InfineonのAURIX TC4xは車載向けマイコンとして機能安全やリアルタイム制御を重視する文脈で紹介されています。ロボット向けにそのまま同じものを使うと断定するのではなく、安全を別系統で監視する設計思想が必要になる、と見るのが安全です。
| 統合される機能 | 役割 | ヒューマノイドで効く理由 |
|---|---|---|
| MCU | 周期的な関節制御 | 滑らかな動きと安定性に関わる |
| DSP | センサー信号処理 | ノイズや遅れを抑えて状態を読む |
| センサーハブ | IMUや力覚を集約 | 各関節の姿勢と力を把握しやすくする |
| 安全機能 | 異常検知と停止 | 人の近くで動くための前提になる |
この表のように、制御SoCは派手な生成AIチップではありません。けれど、ロボットが倒れず、震えず、必要な力で動くためには、この地味な統合がとても重要です。
専用SoCは上位AIチップと何が違うのか
ここで混同しやすいのが、NVIDIA Jetson Thorのようなロボットコンピューターと、関節制御SoCの違いです。Jetson ThorはNVIDIAがフィジカルAIやヒューマノイド向けに紹介している上位演算基盤です。多センサー処理やAI推論を支える存在として重要です。
上位AIチップは世界を理解する
上位AIチップは、カメラ、言語、行動計画、ナビゲーション、物体認識などを処理します。ロボットが「何をすべきか」を考える層です。これは大きなモデルを動かすため、演算性能やメモリ帯域が重要になります。HBMやLPDDRの話は、HBM4逼迫とエッジAI半導体の記事とも接続できます。
制御SoCは体を安定して動かす
制御SoCは、上位AIが決めた行動を、体の動きへ変える層です。ここでは、巨大モデルを動かすより、遅れないこと、揺れないこと、危ないときに止まることが大切です。AIの返事が少し遅れても会話は続きますが、膝の制御が遅れるとロボットは転びます。ここは笑いごとではなく、床と仲良くなる未来を避けるための設計です。
専用化は量産台数が増えてから強くなる
専用SoCは、最初からすべてのロボットに必要とは限りません。開発初期は汎用MCU、既存のロボット制御基板、上位AIコンピューターを組み合わせたほうが早い場合があります。専用化の意味が強くなるのは、台数が増え、コスト、消費電力、基板面積、信頼性をまとめて詰める段階です。
特定メーカーが独自SoCを採用しているかどうかは、公式発表や分解情報が必要です。Tesla、Figure、1X、Unitreeのような企業名は話題性がありますが、この記事では採用断定を避けます。未来予測は、名前の華やかさより、どの機能が専用化されると合理的かで読むほうが危なくありません。
さらに、制御SoCにはログと診断の役割もあります。どの関節で遅れが出たのか、どのセンサー値が不自然だったのか、いつ安全停止が働いたのか。こうした記録が残るほど、量産後の保守や改善は進めやすくなります。ヒューマノイドは動いて終わりではなく、働きながら学ぶ機械でもあるからです。
量産ヒューマノイドで専用半導体がすぐ必要になるとは限らない

ヒューマノイド専用半導体という言葉には、かなり強い未来感があります。けれど、量産ヒューマノイドで専用SoCがすぐ主役になるとは限りません。半導体を専用化するには、設計費、検証費、量産規模、故障時の責任、サプライチェーンを考える必要があります。
汎用チップの組み合わせで十分な段階もある
研究機や少量生産のロボットでは、汎用MCUや既存SoCを組み合わせたほうが合理的です。仕様変更が多い時期に専用SoCを作ると、設計が固まりすぎるリスクがあります。ロボットの体型、関節数、センサー構成、バッテリー設計がまだ動くなら、半導体も柔軟なほうが扱いやすいです。
専用SoCはコストより信頼性で効く可能性がある
量産が見えてくると、専用SoCの意味が変わります。基板を小さくし、部品点数を減らし、センサー処理と安全監視を近づけ、消費電力を抑える。単価だけでなく、組み立てや故障診断、アップデート、長期供給まで含めた信頼性のために統合する可能性があります。
安全規格と現場運用が最後の関門になる
人の近くで動くロボットでは、機能安全と運用ルールが欠かせません。ISO 13482のようなパーソナルケアロボットの安全規格や、産業向け安全設計の考え方は、半導体選定にも影響します。ただし、あるSoCが特定規格に適合していると書くには公式資料が必要です。ここでは、安全を分離して監視する設計が重要になる、という範囲に留めます。
仮想事例として、工場で働くヒューマノイドを考えてみます。上位AIが棚の部品を認識し、次に取る部品を決める。その下で制御SoCが肩、肘、手首の動きを細かく整え、異常な力がかかったらすぐ止める。さらにドライバが関節モータへ電力を渡す。ここまでそろって、初めて「考えるロボット」は「働けるロボット」になります。
次にヒューマノイド半導体のニュースを見かけたら、演算性能だけでなく、その命令がどこで関節の動きへ変わるのかを見てみてください。上位AIはロボットに意図を与えます。けれど、意図を日々の作業へ変えるのは、胴体や関節の近くで黙々と働く制御SoCかもしれません。ヒューマノイドの未来は、頭の良さだけでなく、“脊髄”の確かさで決まっていきます。