オンデバイスVLAは、ロボットの頭脳をクラウドから完全に切り離す技術ではありません。大切なのは、見る、考える、動くという一連の判断のうち、現場で遅れてはいけない部分をロボットの近くで処理することです。20TOPS級NPUという数字は入口になりますが、実際にロボットを動かせるかは、遅延、メモリ帯域、消費電力、制御周期まで含めて見なければ判断できません。
フィジカルAIが面白いのは、AIの答えが画面内で終わらないところです。ロボットが「そこに箱がある」と判断した瞬間、その先には腕を伸ばす、止まる、避ける、つかむという物理的な動きが続きます。だからVLAの半導体は、文章生成AIのチップとは違う緊張感を持っています。少し遅れた正解より、間に合う安全な判断が価値を持つからです。
Google DeepMindはGemini Robotics On-Deviceを、クラウド接続なしでもロボット上で動作するモデルとして紹介しています。NVIDIAもJetson ThorやIsaac GR00Tのように、ロボット向けのエッジAI計算基盤と基盤モデルを前面に出しています。これらの動きから見えるのは、ロボットAIの競争が「賢いモデル」だけでなく、「現場の熱と電力で動くモデル」へ移っていることです。
オンデバイスVLAはロボットの反射神経をクラウドから取り戻す
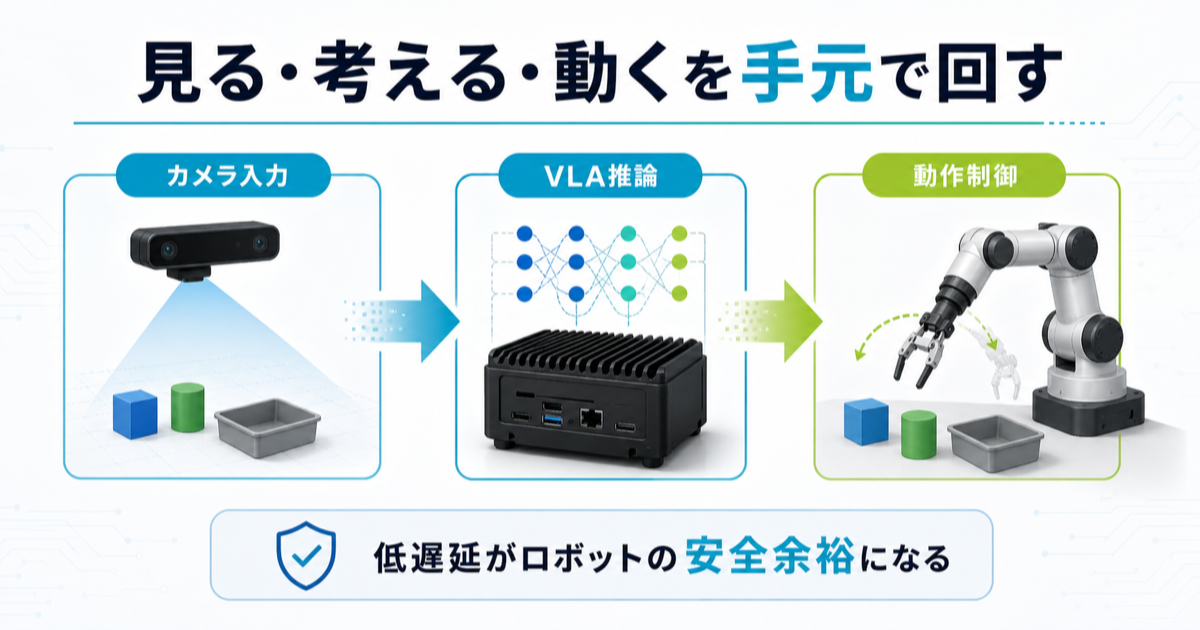
オンデバイスVLAの価値は、ロボットが現場で反応できる範囲を広げることです。すべてをクラウドへ送るのではなく、目の前の変化に対する一次判断を手元で回すことで、遅延と通信断への弱さを減らせます。
VLAは視覚と言語と行動をつなぐ考え方である
VLAはVision-Language-Actionの略です。カメラで見た情報、言葉で与えられた指示、実際にモーターを動かす行動を一つの流れとして扱います。たとえば「赤い箱を右の棚へ置いて」と言われたとき、ロボットは赤い箱を見つけ、右の棚を理解し、腕の動きを決める必要があります。
この流れがクラウドだけに依存すると、通信の遅れや途切れがそのまま動作の遅れになります。工場や倉庫では、通信が少し乱れただけでロボットが止まる設計は扱いにくい。だから、VLAの一部をローカルで動かす需要が生まれます。
低遅延は便利さより安全余裕に効く
ロボットにとって低遅延は、きびきび動くためだけの条件ではありません。人が近づいたときに止まる、落ちそうな荷物を持ち直す、想定外の障害物を避ける。こうした判断では、正解を出すまでの時間が安全余裕になります。
- クラウド向きの処理は、大きな計画や重い学習、複雑な推論
- ローカル向きの処理は、停止判断、近距離の障害物回避、短い作業命令の実行
- スマホやエッジ端末向きの処理は、現場ロボットを補助する中間的な推論
この分担が進むほど、ロボットは「ネットにつながる機械」から「その場で状況を読める機械」へ近づきます。オンデバイスVLAは、クラウドを否定する技術ではなく、クラウドに頼る場所を選び直す技術です。
20TOPS級NPUで見るべきはTOPSより遅延とメモリ帯域
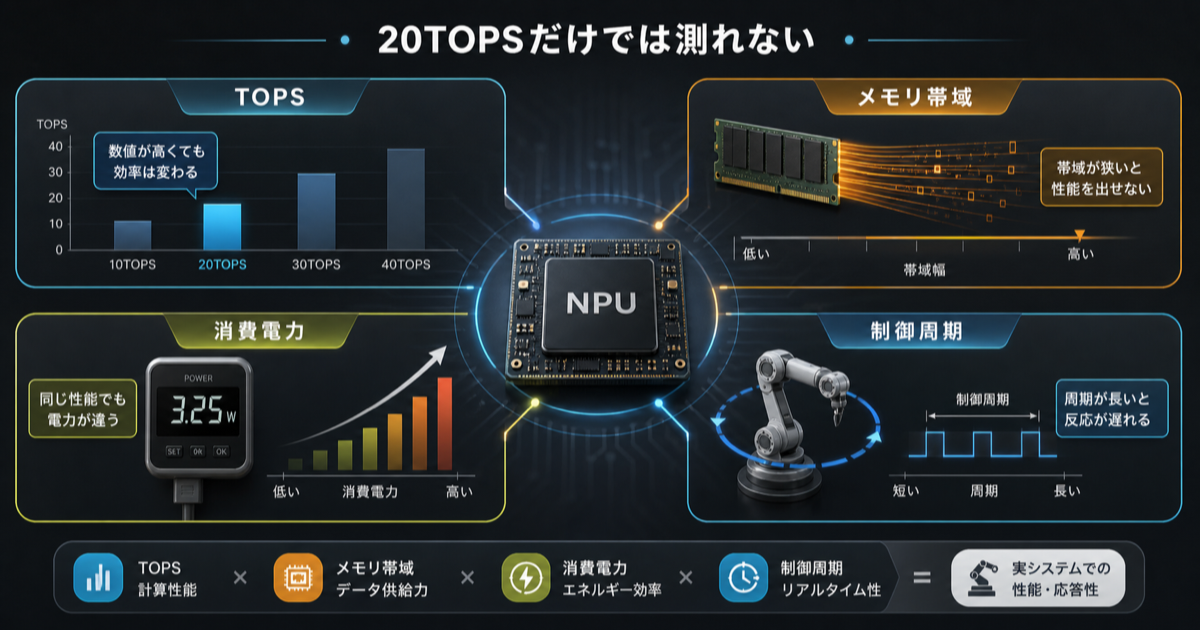
20TOPS級NPUという数字は分かりやすいものの、ロボット半導体を評価するには不十分です。TOPSは演算量の目安であり、ロボットが滑らかに安全に動くかをそのまま保証する数字ではありません。
TOPSはピーク性能であって現場性能ではない
TOPSは、1秒間にどれだけの演算をこなせるかを示す指標です。AIチップの比較ではよく使われますが、現場のロボットではピーク性能より、安定して出せる性能のほうが重要になります。熱で性能が落ちる、メモリ転送で詰まる、制御周期に間に合わない。こうした条件が重なると、数字上のTOPSは動作体験に直結しません。
筆者は、20TOPSという言葉を「このくらいなら小型ロボットやエッジ端末でVLAの一部を動かせるかもしれない入口」と見るのが現実的だと考えています。20TOPSなら何でも動く、という意味ではありません。
メモリ帯域が細いとモデルは動いても遅くなる
VLAモデルは、画像、言語、行動をつなぐため、計算だけでなくデータの移動も重くなります。カメラ映像の特徴量、モデルの重み、動作候補、センサー値をやり取りするには、メモリ帯域が必要です。演算器が速くても、データが届かなければロボットは待たされます。
| 見る指標 | ロボットでの意味 | 見落とすと起きること |
|---|---|---|
| TOPS | AI推論の演算余力 | ピーク値だけ見て実動作を過大評価する |
| メモリ帯域 | 画像特徴やモデル重みの移動速度 | 演算器が空いていても推論が詰まる |
| 消費電力 | バッテリー駆動や発熱の余裕 | 長時間運用で性能を落とす必要が出る |
| 制御周期 | センサー入力から動作反映までの時間 | 安全停止や細かな動作が遅れる |
ここは、以前書いたラピダス2nmマイクロチップの話ともつながります。微細化や先端パッケージは、単にベンチマークを上げるためだけではありません。ロボット本体に収まる熱と電力の中で、必要な性能を安定して出すための土台になります。
ロボット半導体はAI推論とモーター制御の境界へ近づく
フィジカルAIの半導体では、AI推論とモーター制御の距離が近づいていきます。ロボットは、答えを出した後に必ず動きます。だから推論チップだけでなく、制御系との接続が重要になります。
推論した瞬間に動作計画が始まる
画像認識だけなら、「箱を検出しました」で終わるかもしれません。ロボットでは、その箱をどうつかむか、どの角度から近づくか、近くの人や物を避けるかまで続きます。VLAが面白いのは、認識と行動の間にある距離を縮めようとしている点です。
NVIDIAがJetson ThorやIsaac GR00Tでヒューマノイドやロボット向けの計算基盤を強調しているのも、この流れの中で見えます。ロボットのAIは、カメラ映像を理解するだけでは足りません。関節角、力覚、モーター電流、速度制御まで含めた物理データを扱う必要があります。
制御周期に間に合わないAIは現場で使いにくい
ロボットの現場では、AIが賢いかどうかだけでなく、制御周期に間に合うかが問われます。腕を少し動かす、車輪の速度を調整する、障害物を避ける。これらは短い周期で繰り返されるため、AI推論が遅いと制御側が待たされます。
TSMC熊本Fab2と自動運転チップの記事でも触れたように、自動車もロボットも、物理世界で失敗できないAIです。車は道路という整理された空間を走りますが、ロボットは工場、倉庫、家庭、店舗という雑然とした場所へ入ります。そのぶん、ローカル処理の設計はさらに難しくなります。
フィジカルAIの勝負はローカルで失敗できる設計になる

フィジカルAIの勝負は、ローカルで失敗できる設計にあります。失敗できるとは、事故を起こすという意味ではありません。通信が切れる、推論が迷う、センサーが一時的に曇る。そうした小さな異常が起きても、安全側へ倒せる設計のことです。
通信断でも止まれるロボットが信頼される
クラウドAIは強力ですが、通信が切れた瞬間にロボットが判断不能になる設計は現場で不安が残ります。オンデバイスVLAや省電力NPUが重要になるのは、すべてを賢くするためだけではありません。最低限、危ないときに止まる、作業を中断する、周囲の安全を確認する。こうした安全側の判断をローカルで持つためです。
仮想事例として、小さな物流倉庫を考えてみます。クラウド側で大きな作業計画を立て、ロボット本体では近距離の障害物回避と停止判断を行う。この分担なら、通信が一時的に不安定になっても、ロボットは危険な動きを避けやすくなります。
導入判断はチップ単体よりシステム全体で見る
ロボット向け半導体を評価するとき、チップ単体のTOPSだけを比べても足りません。カメラ、センサー、メモリ、通信、制御ソフト、モーター、電源設計まで含めて見る必要があります。フィジカルAIでは、一番弱い部分がそのまま現場性能になります。
ここで読者が持ち帰るべき判断軸はシンプルです。オンデバイスVLAは、ロボットを何でも自律化する魔法ではありません。けれど、現場で遅れてはいけない判断を手元に戻すことで、ロボットの使える場所を広げる技術です。
AI検索に残る答えは導入条件まで言えるかで決まる
AI検索や要約で拾われる記事にするには、用語の説明だけでは弱くなります。読者が知りたいのは、オンデバイスVLAが何かだけでなく、どの条件なら導入価値があり、どの条件ならまだクラウド依存で十分なのかです。たとえば、人の近くで動くロボット、通信が不安定な現場、停止判断を遅らせたくない用途では、ローカル推論の価値が高くなります。
一方で、夜間にまとめて作業計画を立てるだけの用途や、動作がゆっくりで安全柵の内側にある設備なら、すべてをロボット本体へ寄せる必要はありません。この線引きまで書ける記事のほうが、未来予測としても実務の判断材料としても残りやすくなります。
つまり、オンデバイスVLAの価値は、速さそのものではなく、現場で迷わず安全側へ倒せる余白にあります。それが現場導入の境目です。
未来需要はスペック比較から現場適合の比較へ移る
これから検索需要が伸びるのは、「どのNPUが何TOPSか」だけではないはずです。どの作業ならローカルで十分か、どの作業はクラウド連携が必要か、どの現場では消費電力が制約になるか。こうした現場適合の比較が求められるようになります。
次にロボットや半導体の発表を見るときは、モデル名やTOPSだけでなく、そのAIがどこで動き、どれくらいの遅延で制御へ返り、通信が切れたときにどう振る舞うのかを見てみてください。フィジカルAIの未来は、クラウドの巨大な頭脳だけでなく、現場で静かに判断する小さなNPUの中にも育っています。