フィジカルAIが医療の未来を変えると聞くと、手術ロボットや診断AIを思い浮かべる人が多いかもしれません。ただ、フィジカルAIの本質は、単に病気を見つけることではありません。現実の医療現場で、センサーが状態を読み、AIが支援内容を選び、ロボットやデバイスが身体的な作業を助けることにあります。
この文章は、個別の診断や治療を勧めるものではなく、医療現場にフィジカルAIがどう実装されていくかを考える技術解説です。医療では、便利さだけでなく、安全、責任、承認された用途、医療者の判断が欠かせません。だからこそ、未来を語るほど慎重な整理が必要になります。
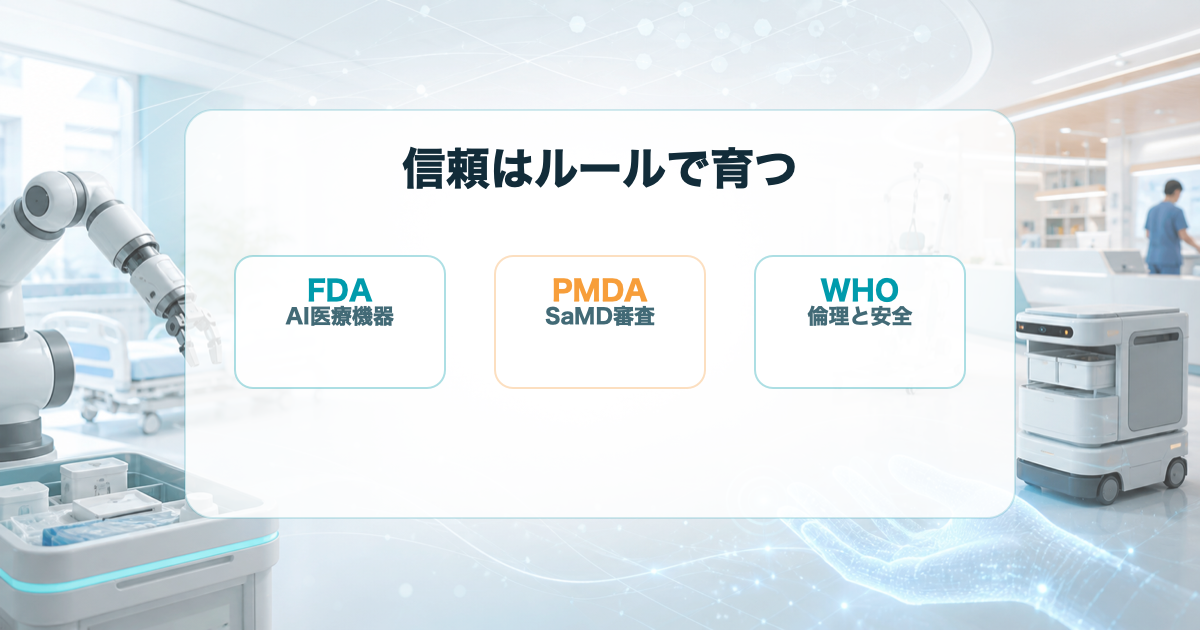
世界保健機関は医療AIの倫理とガバナンスを重視し、米国FDAはAI/MLを用いる医療機器ソフトウェアやAI搭載医療機器の公開情報を整備しています。日本でもPMDAがSaMD、つまりプログラム医療機器に関する情報をまとめ、厚生労働省はSaMD産学官連携フォーラムで社会実装の課題を扱っています。
フィジカルAIは医療の未来で何を変えるのか

医療現場は物理作業の連続でできている
医療は情報だけで成り立つ仕事ではありません。患者の移動を支える、姿勢を変える、リハビリの動きを見守る、薬剤や検体を運ぶ、器具を準備する、身体に触れる力を調整する。こうした作業は、すべて現実の空間で起きています。
フィジカルAIは、この物理作業の一部を支援します。人の手を置き換えるというより、人の手が足りない場所、力加減が難しい場所、同じ確認を何度も続ける場所で、医療者の判断を助ける存在です。画面上のAIと違い、動きや接触を伴うため、失敗したときの影響も大きくなります。
触覚AIは一部であり主役は身体性のあるAIになる
旧来の「触覚AI」という見方は重要ですが、医療の未来を考えるには少し狭くなります。触覚センサーは、ロボットがどれくらいの力で触れているか、柔らかさや抵抗がどう変わったかを知る入口です。しかし、それだけでは現場の作業は完結しません。
重要なのは、触覚、画像、音、位置、動作履歴を組み合わせ、何を支援すべきかを判断し、医療者に分かる形で返すことです。つまり、医療のフィジカルAIは「触るAI」だけではなく、「現場で状況を読み、身体的な支援へつなげるAI」です。
最終判断は医療者に残る
医療現場でAIを語るとき、AIが医師や看護師を代替するという見方は危ういものです。フィジカルAIが得意なのは、変化を拾う、候補を示す、作業負担を減らす、記録を整えるといった支援です。診断や治療の責任ある判断は、承認された用途と医療者の専門性の中で行われる必要があります。
この前提を置くと、フィジカルAIの未来は冷たくありません。むしろ、医療者が人に向き合う時間を取り戻すための技術として見えてきます。人が担うべき判断と、機械が支えられる作業を分けることが、5年後の医療AIを見る鍵になります。
医療現場のフィジカルAIは三層で理解できる
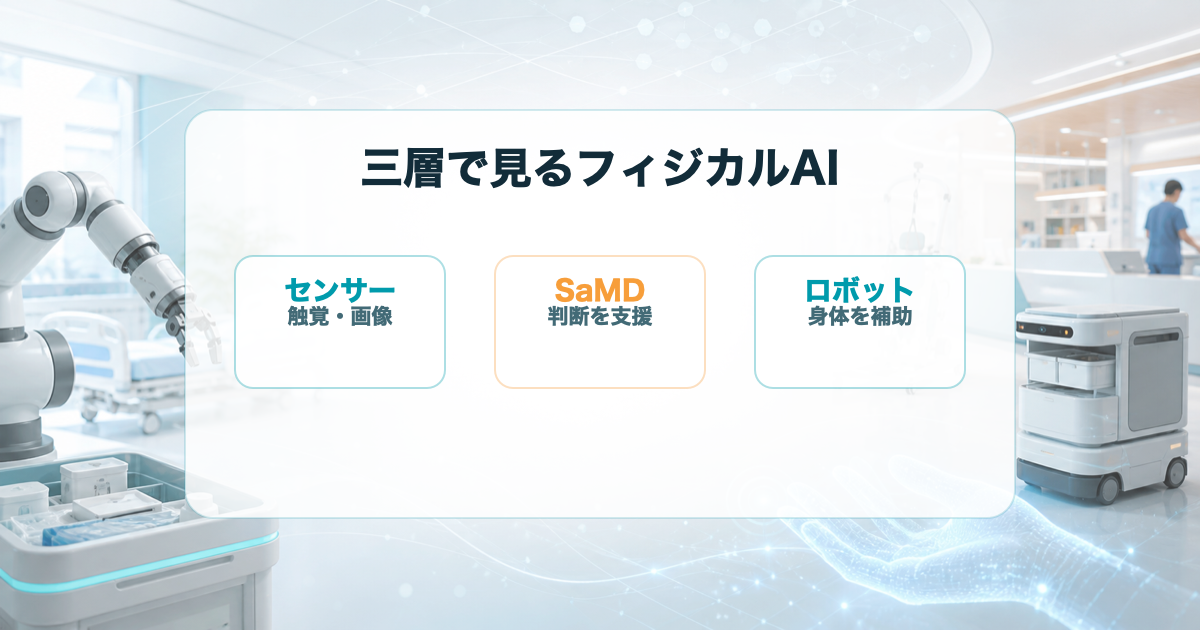
第一層は触覚や画像で現場を知覚すること
フィジカルAIの入口は知覚です。カメラ、深度センサー、力覚センサー、触覚センサー、ウェアラブルデバイス、ベッド周辺のセンサーが、現場の状態を読み取ります。たとえば、リハビリ中の動き、移乗時の姿勢、器具の位置、患者の転倒リスクにつながる変化などです。
ここで大切なのは、データを集めればよいわけではない点です。医療データは極めて慎重に扱う必要があります。必要な情報だけを、目的に沿って、説明できる形で使う設計がなければ、現場の信頼は得られません。
第二層はSaMDとして判断を支援すること
SaMDはSoftware as a Medical Deviceの略で、日本語ではプログラム医療機器と呼ばれます。独立したソフトウェアが医療機器としての目的を持つ場合、薬機法などの枠組みで扱われます。医療AIが現場で判断支援に関わるほど、単なる便利アプリではなく、医療機器としての評価が重要になります。
画像を見て候補を示すAI、患者の状態変化を判定するAI、リハビリの動作を評価するAIは、医療者の判断に影響します。だからこそ、学習データ、性能の範囲、使ってよい場面、更新時の管理、説明責任が問われます。フィジカルAIの医療実装は、ロボット単体ではなくソフトウェアの信頼性にも支えられます。
第三層はロボットやデバイスが身体を支えること
知覚と判断の先にあるのが、身体的な支援です。搬送ロボットが薬剤や検体を運ぶ、リハビリ機器が動作を補助する、介護テクノロジーが移乗や見守りを支える、手術支援ロボットが医師の操作を精密に伝える。ここで初めて、AIは現実の医療現場に触れます。
この構造は、フィジカルAI全体の未来ともつながります。ドローン、建設ロボット、介護機器と同じように、医療のAIも「データを読むだけ」から「現場の動きを支える」方向へ進んでいます。この流れは、LLM搭載ロボットの実用化で見える汎用作業支援とも重なります。
| 層 | 役割 | 医療現場での意味 |
|---|---|---|
| 知覚 | 触覚、画像、動作を読む | 変化やリスク候補に気づく |
| 判断支援 | SaMDやAIが候補を示す | 医療者の確認を助ける |
| 身体的支援 | ロボットやデバイスが動く | 搬送、移乗、リハビリなどを支える |
医療AIの未来は規制と信頼で決まる
承認された用途を超えて使わないことが前提になる
医療AIは、使えそうだから自由に使うものではありません。医療機器として承認や認証の対象になる場合、どの目的で、どの条件で、どの利用者が使うのかが重要になります。AIの出力が治療方針や患者対応に影響するなら、その範囲を明確にしなければなりません。
FDAやPMDAがSaMDに関する情報を整備しているのは、AIを止めるためではなく、安全に実装するためです。フィジカルAIがロボットやセンサーと結びつくほど、ソフトウェアの出力は現場の動作につながります。承認された用途、性能が確認された範囲、人が確認すべき場面を分けることが信頼の土台になります。
生成AIよりも説明できる運用が重くなる
医療現場では、AIがそれらしい答えを出すだけでは不十分です。なぜその候補を示したのか、どのデータを見たのか、どの条件では使うべきでないのかを説明できる必要があります。特にフィジカルAIでは、AIの判断がロボットの動作や人の身体への接触につながるため、説明性と記録が重くなります。
WHOが医療AIの倫理とガバナンスを重視する背景にも、透明性、責任、公平性、プライバシー、監督の問題があります。未来の医療AIは、性能競争だけでなく、どのように管理され、どのように人が介入できるかで評価されるようになります。
日本では相談と審査の仕組みが実装の速度を左右する
日本ではPMDAがSaMDに関する承認審査情報や相談窓口を用意し、厚生労働省も産学官連携フォーラムを通じて課題整理を進めています。医療AIを社会実装するには、研究開発だけでなく、薬事、保険、医療機関での運用、現場教育が必要です。
5年後に差が出るのは、AIモデルを作れる企業だけではありません。医療現場で何を支援するのかを定義し、規制当局や医療機関と対話し、更新後も安全に運用できる企業です。フィジカルAIの医療未来は、技術と制度が同じ速度で進むほど現実味を持ちます。
5年後に広がるのは手術だけではない

搬送と物品管理は早く効果が見えやすい
医療現場では、薬剤、検体、器具、リネン、食事、書類など、多くの物が移動しています。この移動は患者に直接触れる医療行為ではありませんが、現場の負担を大きく左右します。自律搬送ロボットや院内物流の最適化は、フィジカルAIが入りやすい領域です。
5年後には、搬送ロボットが単に廊下を走るだけでなく、エレベーター、病棟、在庫システム、スタッフの作業予定と連動する方向へ進むでしょう。人が患者対応に集中できるよう、物の流れをAIが支える形です。
リハビリは身体データと支援デバイスが結びつく
リハビリでは、関節の動き、重心、歩幅、筋力、疲労、姿勢の変化を継続的に見ることが重要です。フィジカルAIは、センサーで動きを読み、支援デバイスが必要な力を補い、医療者が経過を確認する流れを作れます。
ただし、AIがリハビリ内容を勝手に決めるわけではありません。患者ごとの状態、痛み、意欲、合併症、生活環境は人が見なければならない要素です。AIは動きの変化を見える化し、支援量を調整する補助役として価値を持ちます。
介護と福祉では人手不足を補う現実的な接点がある
医療の未来を病院だけで考えると、フィジカルAIの可能性を見落とします。高齢化が進む社会では、介護、見守り、移乗、排泄支援、コミュニケーション支援、服薬確認など、生活の場に近い領域が重要になります。
経済産業省と厚生労働省は、2024年6月に介護テクノロジー利用の重点分野を改訂しています。ここで示される方向は、フィジカルAIが医療と介護の境界で広がることを考えるうえで参考になります。介護者の負担を減らし、本人の生活の質を支える技術は、医療の未来と地続きです。家庭用フィジカルAIと介護支援の視点から見ても、病院の外で動くAIは重要になっていきます。
遠隔支援は触覚と操作の質が問われる
遠隔医療は映像や音声だけでなく、将来的には手元の動作支援や触覚フィードバックとも結びつきます。離れた場所から専門家が操作を支援する、リハビリの動きを遠隔で確認する、在宅のケア機器が状態を伝える。こうした未来では、通信の遅れ、データの扱い、責任分担が大きな課題になります。
触覚AIはここで意味を持ちます。接触の強さや抵抗感を機械が読み、人に分かる形で返せれば、遠隔支援の質は上がります。ただし、医療用途では研究段階、承認済みの用途、一般的な支援機器の境界を丁寧に分ける必要があります。
| 領域 | フィジカルAIが支える作業 | 5年後に見るべき点 |
|---|---|---|
| 院内物流 | 薬剤、検体、器具の搬送 | 病棟システムとの連携 |
| リハビリ | 動作の計測と支援 | 医療者の確認と個別調整 |
| 介護・福祉 | 移乗、見守り、生活支援 | 負担軽減と自立支援の両立 |
| 遠隔支援 | 触覚や操作の伝達 | 通信、責任、承認範囲 |
フィジカルAI医療の未来に残る壁

安全は便利さより先に設計する必要がある
フィジカルAIは現実の身体や環境に作用します。搬送ロボットなら衝突、リハビリ支援なら過度な力、見守りなら見落とし、触覚支援なら誤った力加減が問題になります。医療現場では、失敗したときの影響が大きいため、便利さより先に止まる仕組み、引き継ぐ条件、人が確認する場面を設計しなければなりません。
AIの出力を現場で使うなら、いつ、誰が、どの情報を見て判断したのかを残すことも重要です。記録は責任追及だけでなく、次の改善に使うための材料になります。
医療データは生活データより慎重に扱う
医療や介護のデータには、病歴、身体状態、行動、生活環境が含まれます。フィジカルAIが現場で動くほど、カメラ、センサー、ロボットのログが増えます。便利な分析のために集めすぎると、信頼を失う可能性があります。
必要なデータを最小限にし、目的を明確にし、アクセス権限を分け、本人や家族に分かる説明を行う。こうした基本が、5年後の医療AIではより重要になります。技術の高度さより、扱い方の誠実さが問われます。
責任の境界が曖昧だと現場は使えない
AIが候補を示し、ロボットが動き、人が最終判断をする。この連携が増えるほど、責任の境界を明確にする必要があります。メーカー、医療機関、医療者、保守事業者、ソフトウェア更新者の役割が曖昧だと、現場は安心して使えません。
導入前に、AIが判断してよい範囲、人に戻す条件、異常時の停止手順、更新後の再確認、患者や利用者への説明方法を決めておくことが欠かせません。フィジカルAIの未来は、技術だけでなく運用契約と教育で支えられます。
- AIの支援範囲と人が判断する範囲を分ける
- 承認済みの用途と現場の使い方をそろえる
- センサーやロボットのログを残す
- 止める条件と引き継ぐ条件を事前に決める
- 患者、利用者、家族へ分かる言葉で説明する
これから見るべき医療AIの変化
見るべきは派手なロボットではなく現場の流れ
医療のフィジカルAIを追うとき、見た目の派手なロボットだけに注目すると本質を外します。大切なのは、現場のどの作業が軽くなったのか、医療者の確認がどこで効いているのか、患者や利用者にとって不安が増えていないかです。
搬送、見守り、リハビリ、記録、手技支援、在宅ケア。どの領域でも、AIが単独で完結するのではなく、人の仕事の流れへ自然に入れるかが問われます。導入事例を見るときは、機能名より運用の変化を見るほうが未来を読みやすくなります。
制度と現場教育が普及速度を決める
フィジカルAIが医療現場へ広がるには、承認、保険、院内ルール、スタッフ教育、保守体制がそろう必要があります。優れたAIでも、誰が使い、誰が説明し、誰が止めるのかが決まっていなければ普及しません。
この意味で、医療AIの未来はスタートアップだけでなく、病院、介護施設、規制当局、メーカー、保険者、教育機関が一緒に作るものです。制度が遅れれば実装は進まず、現場教育が弱ければ使われません。
人の判断を厚くするAIが残っていく
5年後の医療現場で残るフィジカルAIは、人の判断を奪うものではなく、人の判断を厚くするものだと考えられます。見落としやすい変化を拾い、身体的な負担を減らし、記録を整え、医療者が人に向き合う余白を作る。そこに価値があります。
医療の未来を見るなら、AIが何をできるかだけでなく、人が何を手放し、何を守るのかを見ることが大切です。フィジカルAIは、病院や介護の現場を静かに変えていきます。その変化は、機械が主役になる未来ではなく、人がより確かに判断するための環境づくりとして進んでいくはずです。